|
|
aHR0cDovL2ZyZWVzaGlwLmNvLmty   
特性:

Measurement principle:
The linear motion of the measured object is converted into rotary motion by the sensor's flexible steel wire rope and the measuring wheel wound with the steel wire rope (the maximum displacement of this type of sensor can reach 2000mm), and the measuring wheel is connected to the shaft of the encoder. In this way, the linear displacement of the measuring rope can cause the encoder shaft to rotate and output a proportional value that can be recorded.
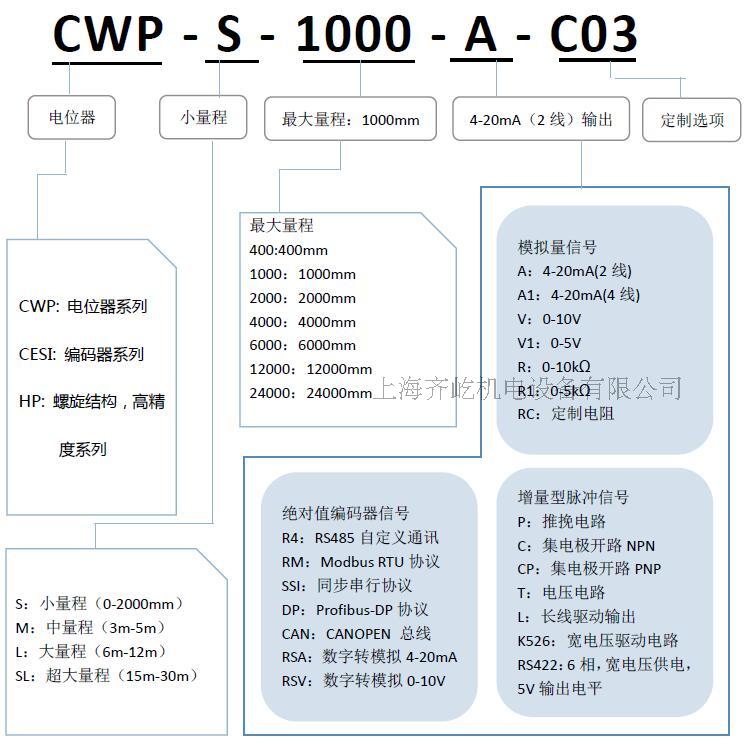
The CALT pull rope displacement sensor supports various output circuits. The pull-wire device and the photoelectric incremental encoder can output open collector NPN, push-pull circuit, long-line drive circuit and RS422 circuit. With intelligent multi-turn absolute value encoder, it can output RS485, Modbus RTU, SSI, 4-20mA, 0-10V output, etc .; With precision potentiometer and amplifier circuit, it can output 4-20mA (2-wire), 4-20mA (4-wire), 0-10V, 0-5V and various Resistive output!
技???:
|
????
|
|
|
??方式
|
增量??器或?????器
|
|
?出?路
|
Push-pull, NPN, RS422/TTL; SSI, RS485, Modbus-RTU, DP-Profibus;0-5Vdc, 0-10Vdc, 4-20mA
|
|
分辨率
|
≤0.1mm/??
|
|
精度
|
0.02%FS
|
|
供???
|
5Vdc 5-26Vdc 10-30Vdc
|
|
???率
|
最大300KHz
|
|
机械??
|
|
?量范?
|
最大2000mm
|
|
?量?周?
|
150mm
|
|
???格
|
0.6mm高柔性304不????
|
|
允?拉?速度
|
最大0.6m/s
|
|
震?
|
10Hz to 2000Hz
|
|
拉?拉力
|
5N
|
|
使用?命
|
200万次
|
|
外?材?
|
?合金
|
|
工作?度
|
-25°C~80°C
|
|
保存?度
|
-40°C~80°C
|
|
防?等?
|
IP54
|
|
重量
|
<0.7KG
|
机械尺寸:

行??用:


?型指?:
|
|
|
|
|
















 배송기간
배송기간